关于我们








视觉贴标机的原理方案简述
时间:2025-04-15
浏览量: 2682次
视觉贴合机原理方案简述
基本原理
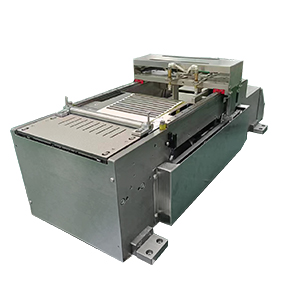
视觉贴合机是一种利用机器视觉技术实现高精度对位贴合的设备,主要由视觉系统、运动控制系统和贴合执行机构三大部分组成。其核心原理是通过摄像头捕捉被贴合部件的图像,经图像处理算法计算位置偏差,再驱动位移或旋转平台进行[敏感词]调整,终完成自动化贴合。
系统组成
1. 视觉采集系统:采用工业相机搭配高分辨率镜头,通常使用500万像素以上的CMOS传感器,配合环形光源或同轴光源确保成像质量。
2. 图像处理单元:通过边缘检测、模板匹配等算法识别基准标记点(Mark点),计算实际位置与理论位置的X/Y/θ三轴偏差。
3. 运动控制系统:采用伺服电机+精密丝杠/直线电机驱动,重复定位精度可达±2μm,配合光栅尺闭环反馈确保移动准确性。
工作流程
1. 上料机构将基材和覆盖膜分别送至工作台
2. 视觉系统对两侧Mark点进行拍照比对
3. 控制系统计算位置补偿量并驱动平台调整
4. 贴合头在真空吸附条件下完成精准压合
5. 质量检测系统验证贴合效果
关键技术要点
- 采用亚像素算法提升定位精度(可达0.1像素)
- 多相机协同标定确保大尺寸贴合精度
- 运动控制需考虑加减速曲线避免振动
- 环境温湿度控制对精度有重要影响
该方案适用于显示屏、触摸屏、光学膜等多种精密贴合场景,相比传统人工贴合可提升效率3-5倍,良品率可达99.5%以上。
上一篇:
视觉贴标机的市场应用概况介绍
下一篇:
全自动贴标机的行业需求特点


 微信咨询
微信咨询