关于我们








双相机配合是视觉贴标机的高效精准解决方案
时间:2025-06-29
浏览量: 2193次
双相机配合在视觉贴标机中借助协同定位与实时补偿机制,显著提高了贴标精度和效率,是工业自动化领域的核心解决方案,具体优势及实现方式如下:
一、技术原理与定位机制
-
双相机协同定位
- 上相机(移动端):安装于机械臂或移动平台上,对抓取的待贴标物体进行实时成像,通过九点标定法构建物体坐 标与机械臂坐标系的映射关系。
- 下相机(固定端):固定在贴标工位上方,[敏感词]捕捉贴标区域的基准位置,结合标定矩阵计算目标坐标。
协同流程:上相机识别物体位置偏差,下相机定位贴标点,系统利用坐标转换矩阵,如实时补偿机械臂运动轨迹, 实现亚毫米级精度±0.1mm。
-
动态补偿技术
- 旋转中心标定:通过拟合圆心坐标算法,计算旋转轴与标定中心的偏差,确保在任意角度贴标时补偿的稳定性。
- 飞拍对位: 双相机在高速运动中同步采集图像,通过边缘计算(FPGA/ASIC)将处理延迟降低至微秒级,可支持400件/分钟的超高速产线。
二、核心优势与性能对比
-
精度与效率提升
-
兼容性与智能化
- 多规格适配:通过调节传送带间距(如横向螺纹轴+滑轨设计),可支持6mm×8mm微型标签至A4尺寸标签。
- AI算法嵌入:如YOLOv5模型能够自主学习新产品特征,减少标定次数,提升柔性生产能力。
三、行业应用场景
-
高精度电子行业
- 手机电池/平板外壳:双CCD定位可修正金属反光干扰,贴标节拍达0.3秒/片。
-
曲面与透明包装
- 化妆品瓶/异形容器:3D视觉(结构光/ToF)可补偿曲面变形,使标签贴合无气泡。
-
双标同步作业
- 纸卡类产品:双标头可同步贴前后标签,配合螺杆调节机构适应不同纸卡尺寸。
四、技术发展趋势
-
多模态感知融合
- 结合3D视觉、红外与光谱数据,以解决透明薄膜反光等复杂场景问题。
-
云端协同优化
- 实现远程运维与模型在线更新,达成预测性维护。
-
边缘计算集成
- 如HPS - HSC2K相机支持1490fps超高速成像,本地化处理可降低延迟。
实施建议
- 选型优先级:在高精度场景(如医疗芯片)中,建议选用CCD相机+光栅尺闭环系统;在成本敏感场景(日化品)中,可选择国产PLC方案。
- 维护要点:定期使用无尘布和纯酒精清洁镜头,校验旋转中心标定参数,以保持补偿的稳定性。
双相机系统通过硬件协同与智能算法的深度融合,已成为视觉贴标领域高效精准的典范。进一步的技术细节可参考工业相机选型指南及标定算法源码。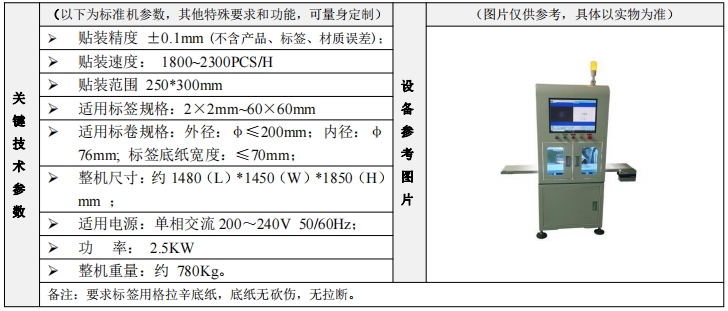


 微信咨询
微信咨询